Unidades de Control
1. Unidades de control
Las unidades de control son dispositivos electrónicos que actúan como “cerebro” de un sistema robótico. Su función principal es recibir señales desde los sensores, procesar la información según la lógica programada, y generar señales de salida hacia actuadores (motores, servos, relés, etc.).
En el ámbito académico y de prototipado, las más comunes son los microcontroladores (Arduino, PIC, STM32) y, en sistemas más complejos, computadoras de placa reducida (Raspberry Pi, BeagleBone).
| Unidad Control | Longitud de Palabra | Clock | RAM | FLASH | E2 PROM | I/O | ADC (canales x bits) | DAC | PWM (canales x bits) | S.O. | Conectividad | Núcleos |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ATtiny85 | 8 bits | 8 MHz | 512 bytes | 8 KB | 512 bytes | 6 pines | 2 x 10 | No | 2 x 8 | No | No | 1 |
| Arduino Uno R3 | 8 bits | 16 MHz | 2 KB | 32 KB | 1 KB | 14 digitales | 6 x 10 | No | 6 x 8 | No | USB | 1 |
| ESP32-S3 | 32 bits | 240 MHz | 512 KB | 16 MB | No | 44 pines | 18 x12 | 2 x 8 bits | 16 canales | NO | Wi-Fi, Bluetooth | 2 |
| Raspberry Pi Pico | 32 bits | 133 MHz | 264 KB | 2 MB | No | 26 | 12 bits | No | 16 canales | No | No (Wi-Fi solo en Pico W) | 2 |
| Raspberry Pi 5 | 64 bits | 2.4 GHz | 2–16 GB | 2–16 GB | No | 40 | 12 bits | No | 28 canales | Linux | HDMI, USB, Ethernet, Wi-Fi, Bluetooth | 4 |
- Una palabra es la cantidad de bits que el procesador puede manejar, almacenar o transferir como una unidad es sus registros internos.
- El clock es la frecuencia con la que trabaja el procesador
- Tipos de memoria posibles
- Flasj
- PROM
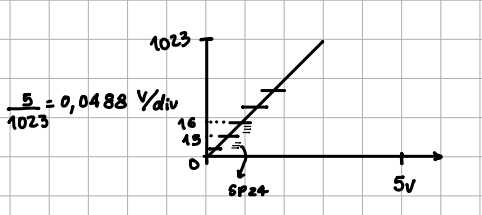
Curva de conversión de analógico a digital. Puede haber distintas resoluciones
2. Líneas de entrada y salida
Las líneas de un microcontrolador se clasifican como:
- Entradas: reciben información del entorno mediante sensores (temperatura, distancia, luz, etc.).
- Salidas: envían señales hacia actuadores (motores, LEDs, pantallas, etc.).
Estas líneas pueden ser configuradas por software, permitiendo definir si un pin funciona como entrada o salida.
3. Líneas digitales y analógicas
- Líneas digitales: solo reconocen dos estados:
0(LOW, 0 V)1(HIGH, generalmente 5 V o 3.3 V)
Son ideales para botones, interruptores o sensores de estado binario.
- Líneas analógicas: pueden captar o generar valores continuos dentro de un rango (ej. 0–1023 en Arduino UNO con 10 bits de resolución).
Permiten leer sensores que entregan valores proporcionales (ej. un potenciómetro o un sensor de temperatura analógico).
4. Salidas PWM (Pulse Width Modulation)
El PWM es una técnica para simular señales analógicas usando salidas digitales. Consiste en variar el ciclo de trabajo (duty cycle) de una señal cuadrada:
- 0% → señal siempre en LOW.
- 50% → mitad del tiempo HIGH, mitad LOW.
- 100% → señal siempre en HIGH.
Aplicaciones:
- Control de velocidad de motores de corriente continua.
- Regulación de brillo en LEDs.
- Control de posición en servomotores.