Sensores
1. ¿Qué son los sensores en robótica?
- Son dispositivos que permiten a un robot percibir su entorno o su propio estado interno.
- Transforman una magnitud física (luz, sonido, temperatura, distancia, fuerza, etc.) en una señal eléctrica que puede ser interpretada por el sistema de control.
- Cumplen el rol de “sentidos” del robot, fundamentales para tareas de navegación, manipulación y control autónomo.
🔹 Ejemplos: sensores ultrasónicos, cámaras, acelerómetros, giroscopios, sensores de temperatura, sensores táctiles.
2. Diferencia entre sensor digital y analógico
| Característica | Sensor Analógico | Sensor Digital |
|---|---|---|
| Tipo de señal | Entrega una señal continua, que puede tomar infinitos valores dentro de un rango (ej: 0–5 V). | Entrega una señal discreta, generalmente en forma de 0 y 1 (encendido/apagado). |
| Precisión | Permite mayor riqueza de información (ej: medir temperatura exacta). | Más simple, pero la información es limitada (ej: temperatura “alta” o “baja”). |
| Ruido | Más sensible al ruido eléctrico y necesita filtrado. | Menos sensible al ruido, señal más estable. |
| Ejemplo | Un potenciómetro que varía voltaje según posición. | Un sensor de contacto que solo indica si fue presionado o no. |
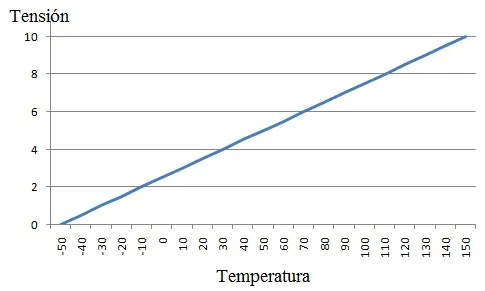
3. Curvas de respuesta
- Una curva de respuesta muestra cómo varía la salida del sensor frente a diferentes valores de la magnitud que mide.
- Sirven para calibrar y entender la sensibilidad, rango y precisión del sensor.
🔹 Ejemplo 1 (Analógico):
Un sensor de luz (LDR) disminuye su resistencia conforme aumenta la intensidad lumínica. La curva no es lineal: pequeños cambios de luz en bajas intensidades producen grandes cambios de señal, pero en intensidades altas la variación es menor.
🔹 Ejemplo 2 (Digital):
Un sensor de límite (switch) solo tiene dos estados: abierto o cerrado. Su curva de respuesta es un salto abrupto, no gradual.